Warning: Undefined array key "license" in /home/aslethz/public_html/harmdev/wp-content/plugins/elementor-pro/license/api.php on line 354 Grasping and manipulation – Harmony Warning: Undefined array key "options" in /home/aslethz/public_html/harmdev/wp-content/plugins/elementor-pro/modules/theme-builder/widgets/site-logo.php on line 93 Skip to content
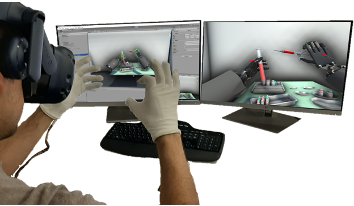
Learning grasping and manipulation from demonstration via an immersive control interface
Robotic manipulation is challenging especially in new scenes that are unseen before or during the robot movements. Furthermore, current systems cannot be verified according to the well-established safety standards required in clinical and medical operations.
We aim to address these challenges by learning from the demonstrations of medical professionals via an immersive control interface.
This approach provides a natural and intuitive way for medical staff to deliver new manipulation capabilities at aided, semi-, and autonomous levels.
We will exploit clinically proven haptic devices to demonstrate a wide range of daily operations following specific safety measures, using multi-sensory gesture recognition, motion retargeting, and adaptation for dexterous and precise manipulation.