Harmony System Architecture: Now Interactive!
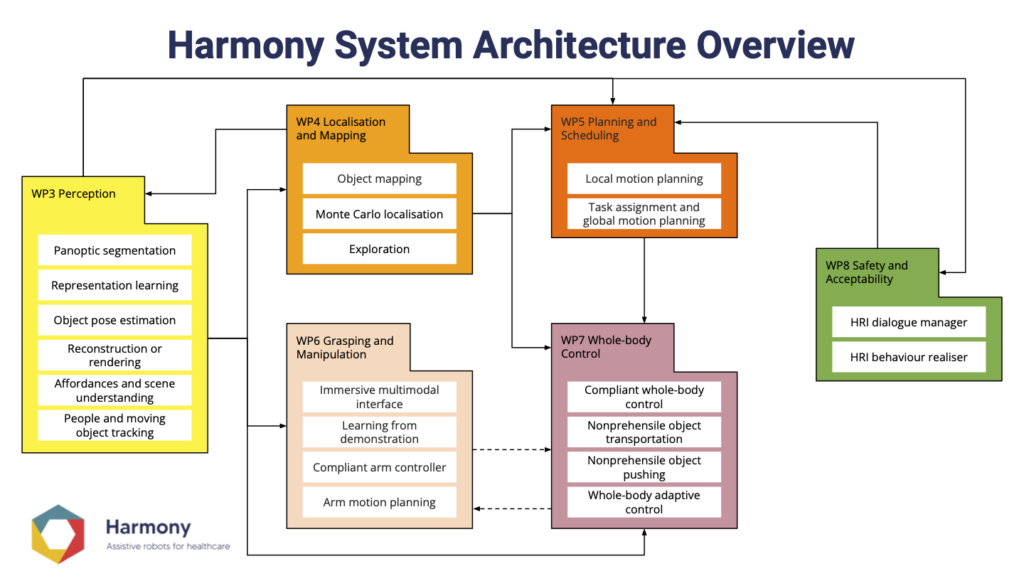
Tired of reading reports? Why not discover the Harmony system architecture through our online and interactive tool?
Harmony Invited Talk at ICRA Workshop
Mario Selvaggio from CREATE is an invited speaker at the ICRA 2022 Workshop on Human-Centered Autonomy in Medical Robotics.
Harmony Integration Week April 2022

Two locations, two robots, one week to kick off our integration efforts!
ICRA2022 Workshop on Shared Autonomy in Physical Human-Robot Interaction: Adaptability and Trust

As part of the ICRA 2022 Conference our partners at CREATE are hosting a workshop on Shared Autonomy for Physical Human-Robot Interaction.
Workshop: Context-awareness in human robot interaction (online)
As part of the ACM/IEEE International Conference on Human-Robot Interaction (HRI), our partners at the University of Twente are co-organising a workshop to discuss the latest developments in intelligent social robotics.
M12 General Assembly
We just held our first General Assembly with the full Harmony consortium!
Onsite visits at USZ and ETHZ

We had a super productive onsite visit at Universitätsspital Zürich and ETH Zürich.
Harmony @ Scientifica: Zürich Science Days

This year ETH Zürich and the University of Zürich opened their doors once more to the public to showcase the research work happening on campus.
TRO paper in press
A shared-control teleoperation architecture for nonprehensile object transportation.
Harmony featured in TU Delft stories

Take a look at how our motion planning experts, lead by Prof. Javier Alonso-Mora, are developing ways for robots to move safely and seamlessly around people!